The Competition Bots (early look)
Just a quick break from the Creeper Bot to update everyone on the progress of the competition robots.Again, I feel pretty helpless, these students are so adept at building their bots, I feel so out of my element! For example, I was concerned about a 3 gear setup (to offset one motor from another) from a 2 gear ratio on the other side of a linked part. Turns out, as I was educated properly :), the idler gear doesn't matter, and on my way home I thought about it, sure enough....
| Left Drive | Right Drive |
|---|---|
| drive gear = 5 teeth | |
| idler gear = 20 teeth | drive gear 1 = 5 teeth |
| load gear = 30 teeth | load gear = 30 teeth |
| 5/20 * 20/30 = 5/30 | 5/30 |
I can't wait till we get to something I can help with LOL.
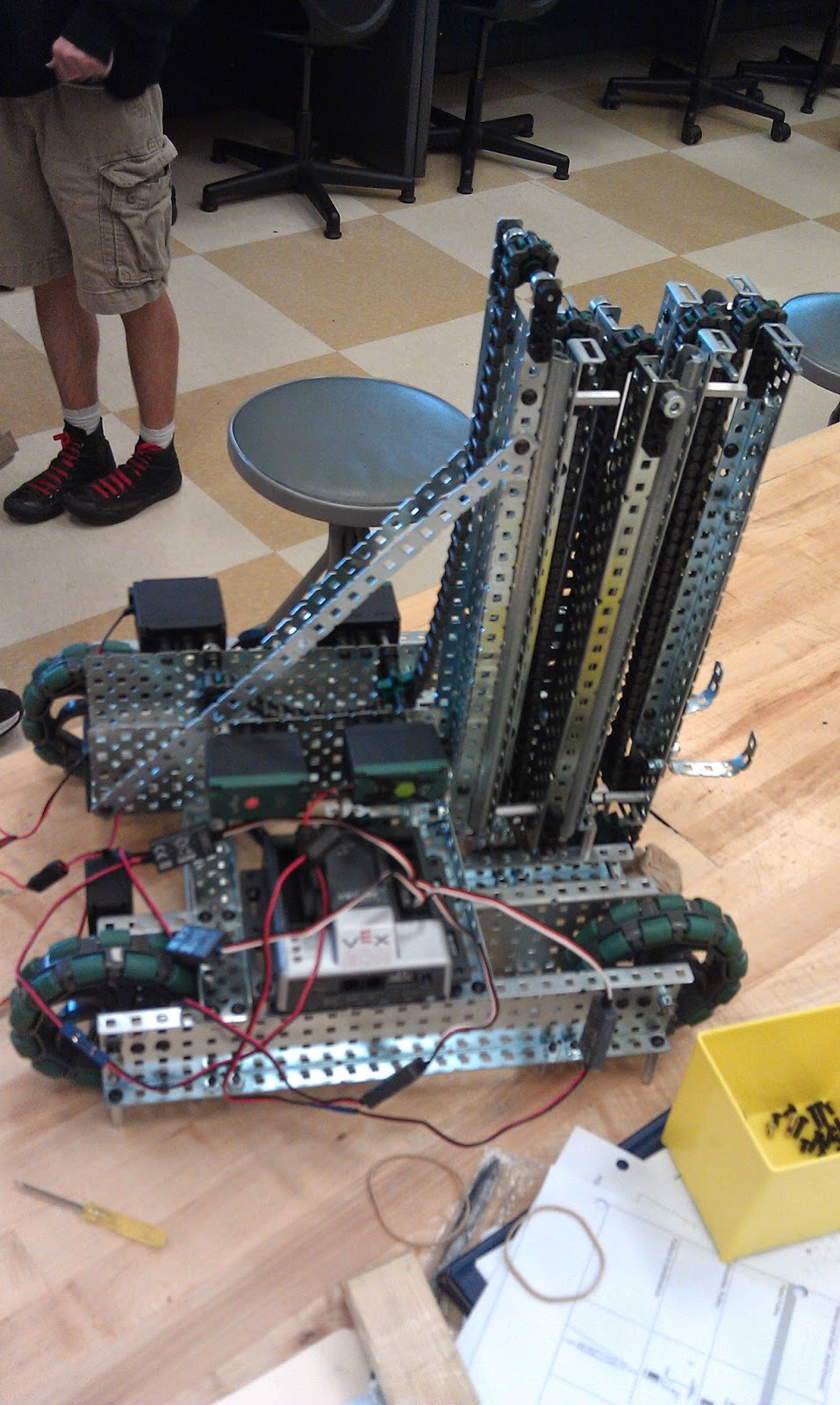
Anyway, I was able to get some pics of some of two of the robots under way. These two are starting to take shape, the third one is really close and I'll get a shot of that next week. This beauty is quite a mechanical engineering project. The tower on the right has a chain snaking through it driven by 4 motors. Drive the chain one direction, the sliders rise up, drive the chain the other and they are drawn down. This looks like it has a lot of promise!
 This second shot is the robot I mentioned in Post #1 with with the wheels mounted in a unique way. This will allow it to move sideways, maybe saving time turning. Run it up to the wall, slide it sideways until you are over the post, set the cube on the post. This has good promise too, I like it since it is unique. This robot shares the same lifting scenario with the third robot in the club, a lever (not yet complete). There are examples of bots like this on youtube that look like they get a nice advantage from the strafing motion they are capable of.
This second shot is the robot I mentioned in Post #1 with with the wheels mounted in a unique way. This will allow it to move sideways, maybe saving time turning. Run it up to the wall, slide it sideways until you are over the post, set the cube on the post. This has good promise too, I like it since it is unique. This robot shares the same lifting scenario with the third robot in the club, a lever (not yet complete). There are examples of bots like this on youtube that look like they get a nice advantage from the strafing motion they are capable of.One more thing. Notice those blue cubes over on the right? They are way bigger than any of the pictures or video's make them appear. This is what these robots have to lift and place on a post, won't be easy!
Back to the creeper:
Status of Parts

Of course the first part I need is the last to arrive. I have one more part I'm waiting on to get started (well, 2, the RF Chokes are in the same shipment). I need to build that noise isolation circuit and am waiting on the prototype board. I could buy one at Radio Shack, but since I already ordered it, i'll just wait. It shipped, should be here by the end of the week.
 Also, ordering this bluetooth adapter tonight, it is a bit more expensive than others you can get on Amazon, but this one comes with a bit more support, documentation and libraries to make it easier to work with. I'm going to be connecting to it from Android which means I have to keep my baud rate at 9600, but in the future when the club wants to do more with it, the baud rate is easily changed using software up to 115200, something cheaper modules can do only if you can figure out how. Plus, adafruit has some great products and super support, I don't mind supporting them (they are supporting me with great documenation!) [note: Apple does not allow their devices to talk SPP with bluetooth, so anyone with the Apple, you won't be able to talk to the robot :( with your new Iphone 6's.... ]
Also, ordering this bluetooth adapter tonight, it is a bit more expensive than others you can get on Amazon, but this one comes with a bit more support, documentation and libraries to make it easier to work with. I'm going to be connecting to it from Android which means I have to keep my baud rate at 9600, but in the future when the club wants to do more with it, the baud rate is easily changed using software up to 115200, something cheaper modules can do only if you can figure out how. Plus, adafruit has some great products and super support, I don't mind supporting them (they are supporting me with great documenation!) [note: Apple does not allow their devices to talk SPP with bluetooth, so anyone with the Apple, you won't be able to talk to the robot :( with your new Iphone 6's.... ]
Stay Tuned! This is fun!
No comments:
Post a Comment