|
| Meet Rue, my new time sink! :) |
Also, I was waiting on more pins from Jameco so that I could make more wires, they came in on Saturday.
First the SUCCESS!
The new bluetooth module from Adafruit came in, remember when I said the first one wasn't working and I posted a link over to the support? When I escalated to the support email, they responded quickly and offered to ship me a new one at whatever shipping speed I wanted, that was super cool, but I chose the cheapest shipping route anyway. The new bluetooth module rocks, I was able to hook up my old Thunderbolt and my new LG G3! I was even able to write some code down in the Arduino and read out the control characters sent. It works great.
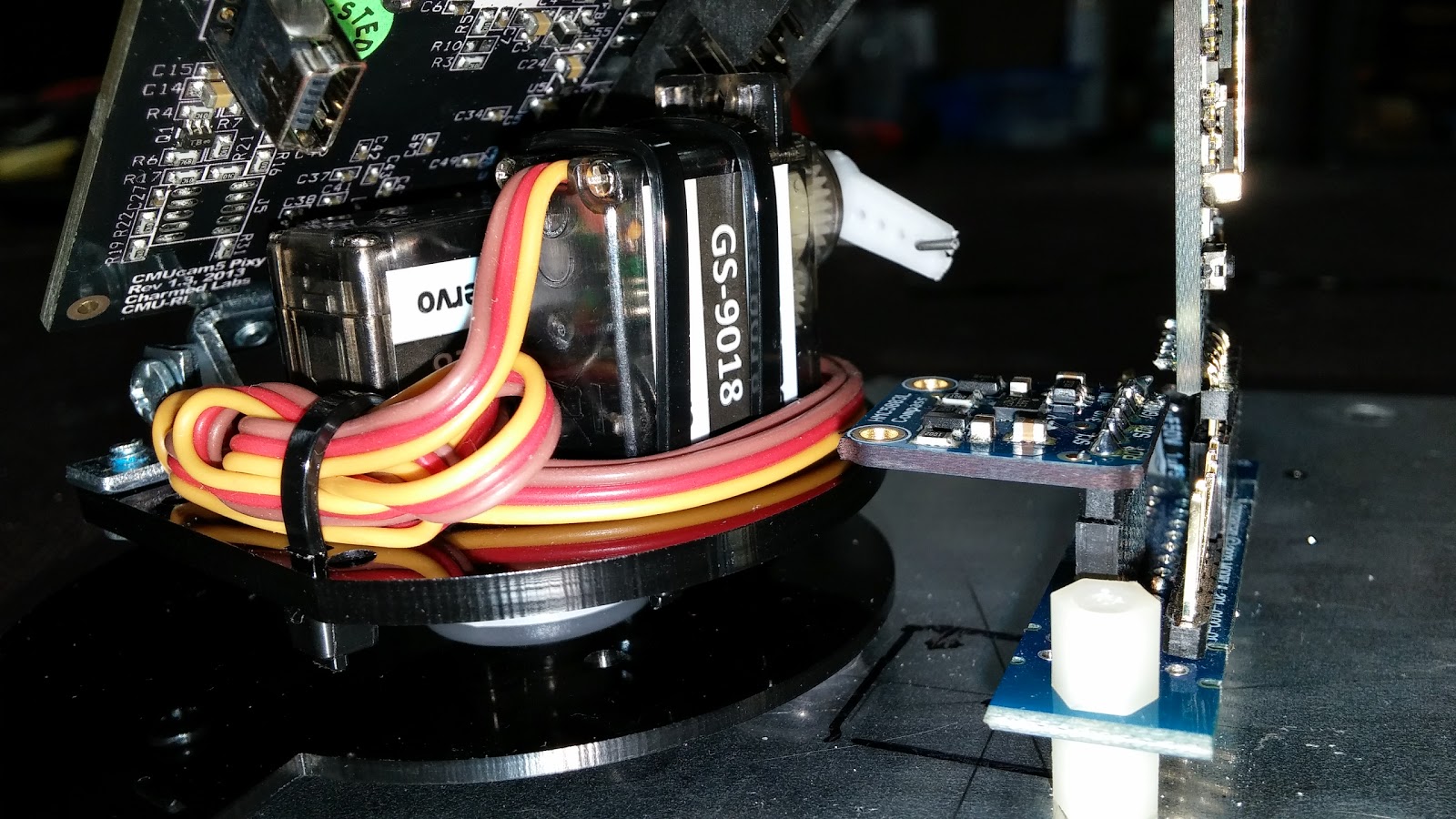
With the exception of 2 or 3 wires left to hook the PIXY up to the Arduino, I'm for all practical purposes WIRING COMPLETE as well! This is quite a milestone, this means that I can now focus on the code. I've been able to import the SHARP IR sensor libraries, I found a library for motor controls that I'm going to convert to regular code (it uses Delays, very bad for simultaneous control of anything), and even have all the pins defined and set up in the "SETUP" section of the code. When I get it more complete, I'll post another page with the version 1.1 code (version 1.1 should have motor controls, bluetooth reads and IR sensor reads, along with the compass reads already done).
Now the FAIL :(
EVEN after checking the wiring on the SHARP modules 4 times (yeah, both of them), printing out the datasheets and triple checking my hookups, I put 5V on the Analog Output pin (yeah, on both of them!), thus huffing my IR Proximity Sensors (did I mention, BOTH OF THEM?)! OY VEY! As I was writing code, I kept smelling something cooking, and it didn't come from the kitchen. I smelled all around the bot, couldn't find it, then touched one of the sensors and it was burning hot! ugh. So ordered 2 more from Amazon, they will be here Wednesday. Luckily, it will be an easy swap, but.... argh. I guess this one we can blame on Rue and no sleep! Oh well. Can't make an omelet without breaking some eggs.
AND THE COOL
 |
| Another shot of the Arena, all set up! |
The club is getting better and better at setting up the Arena. This pic shows it set up with all the blocks in place. The thing is the size of a small bedroom! It is very cool. Now it is time to test the bots, make adjustments, troubleshoot failures (these can be a real shot in the dark). The teams have done a great job to get to this point... but they are only in prototype stage, time to make improvements! I can actually help here as well, so now I don't feel so helpless! I can least help assemble and tear down the arena LOL.
MORE COOL!
Remember a couple posts ago I promised to post the video of the PIXY mounted and running on the creeper? Enjoy.